Priority Area 2 – Autonomy
Autonomous dexterous manipulation of complex components in complex workspaces. Robots need to extend their sensory perception and autonomous cognition capabilities to effectively carry out increasingly complex tasks, deal with variations and disruptive changes.
Aim
Enable automation with more human-like dexterous manipulation and assembly skills to manipulate non-rigid and composite objects and tools while adapting to new and changing situations with minimal human intervention.
Motivation
From construction and catering to bespoke and high-value manufacturing, there is a critical need to enhance robotic systems with more human like manipulation skills. Current robotic gripping and manipulation tools limited in dexterous skills to very basic tasks and environments and simple objects.
We will address the strategic need for intelligent and adaptive manipulation with human co-workers, creating new opportunities for automation in less well-structured environments and for objects with less predictable behaviours, including non-rigid and difficult-to-handle parts, non fixed or adaptable workspaces and on-site environments.
Approach
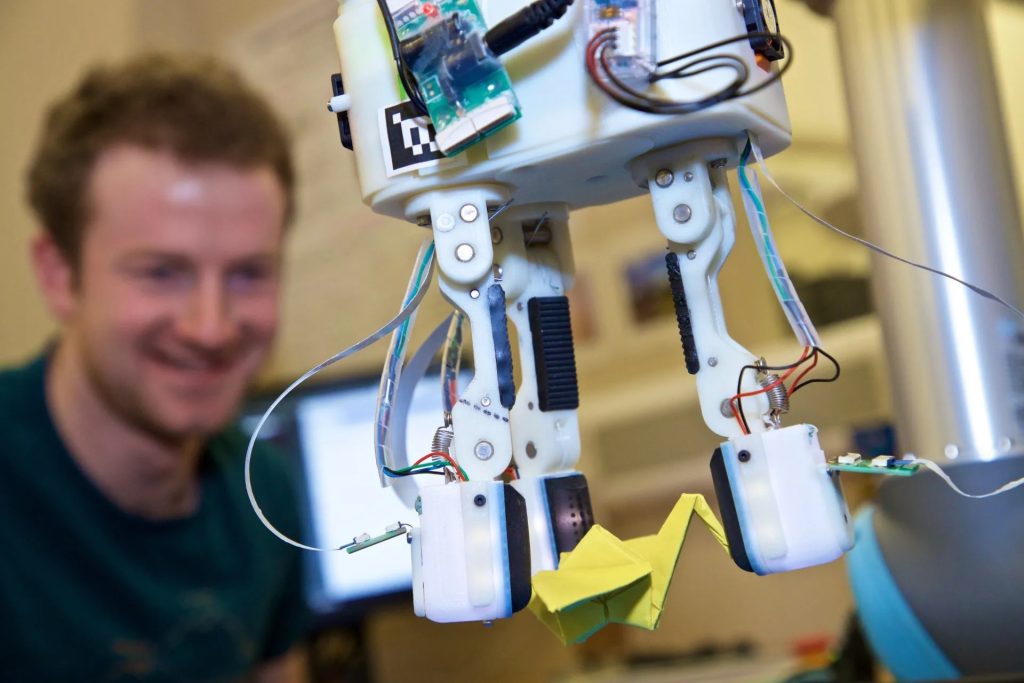
- Exploit recent advances in adaptive soft robotic grippers which combine compliant actuation and self-adaptation with controllable electroadhesion and exteroceptive sensing capabilities.
- Adaptive morphologies will be combined with intelligent learning (exploiting online reinforcement and offline deep learning) and perception (including slip, texture, force, dynamic materials and object behaviour) algorithms to deliver novel adaptive dexterous gripping and manipulation systems.
Key Deliverables
D2.1: A toolkit of adaptive and soft sensorised gripping technologies for handling compliant, varied and complex composite objects, from soft and brittle cakes to cucumbers to books, t-shirts and packets of crisps.
D2.2: Intelligent adaptive planning and manipulation control methods suitable for unstructured and non-stationary environments (from factories to kitchens)
D2.3: Smart and sensorised soft manipulators (D2.1) with integrated sensorimotor control algorithms (D2.2), delivering dexterous and adaptive manipulation.
Testbeds
The PA2 testbed is an industrially-focused manipulation testbed. A high-end facility to provide a formal evaluation environment to enable collaboration and knowledge transfer with stakeholders. It comprises low-cost, readily fabricable, effective adaptive manipulators and control systems. These will be demonstrated and available for partners to evaluate in end-user-inspired tasks, including close-to-human operation picking and packing in autonomous warehousing and the cooperative handling and assembly of foodstuffs and textiles.
Team
Priority Area 2 Leads are Professor Jonathan Rossiter (University of Bristol), Professor Nathan Lepora (University of Bristol), Professor Xiu Tan Yan (University of Strathclyde) and Professor Peter Kinnell (University of Loughborough).